

目录
快速导航-

计算机科学与应用 | 基于动态图表示学习的轻量化节点分类方法
计算机科学与应用 | 基于动态图表示学习的轻量化节点分类方法
-
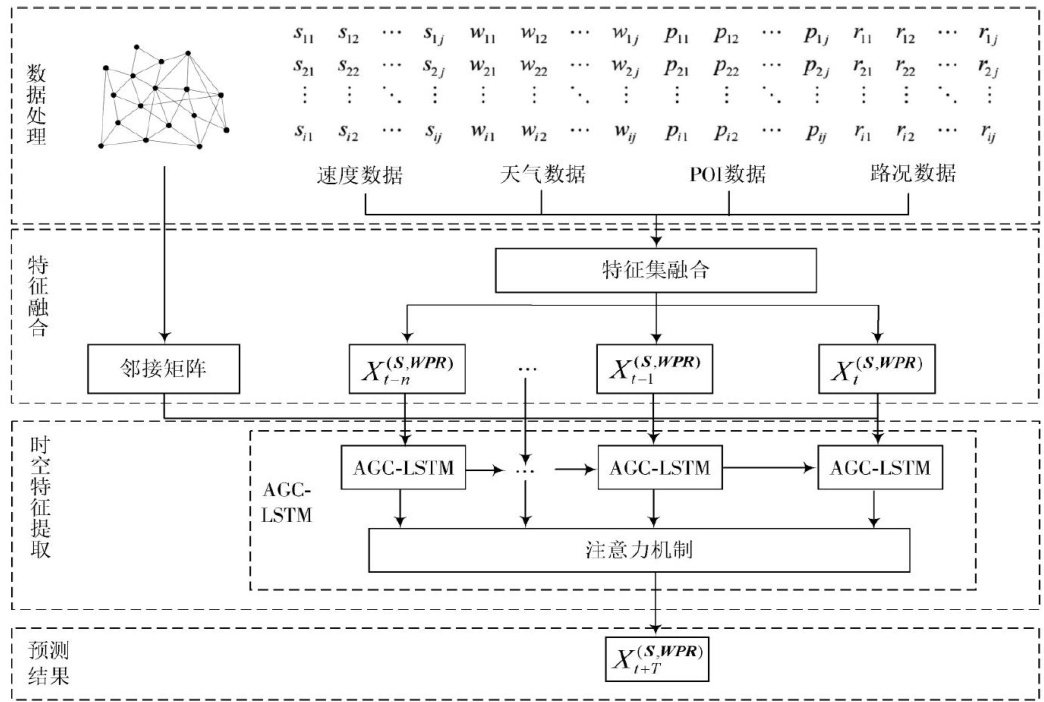
计算机科学与应用 | 多因素融合下基于AGC-LSTM的短时交通速度预测
计算机科学与应用 | 多因素融合下基于AGC-LSTM的短时交通速度预测
-
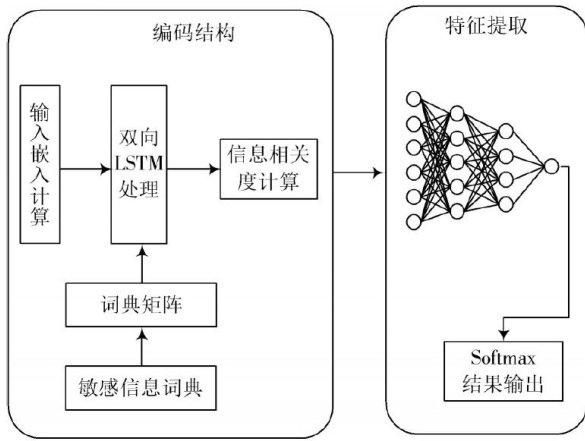
计算机科学与应用 | 基于自然语言语义感知的敏感信息识别与分析算法
计算机科学与应用 | 基于自然语言语义感知的敏感信息识别与分析算法
-

计算机科学与应用 | 基于区块链的政务数据共享方案研究
计算机科学与应用 | 基于区块链的政务数据共享方案研究
-
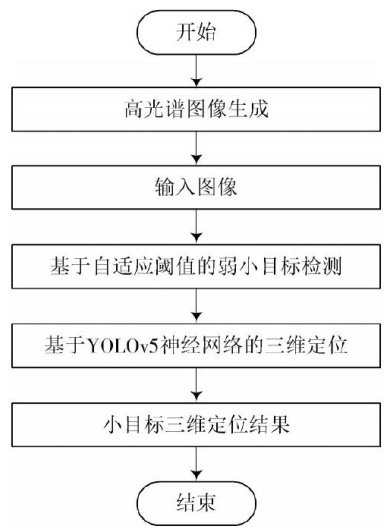
计算机科学与应用 | 高光谱图像弱小目标深度定位算法
计算机科学与应用 | 高光谱图像弱小目标深度定位算法
-
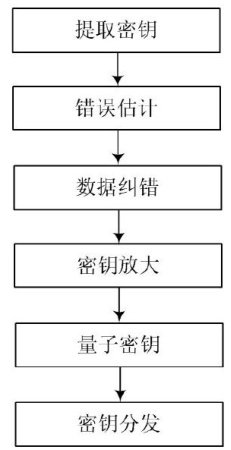
计算机科学与应用 | 基于扩展量子密钥分发的多实体联合身份认证研究
计算机科学与应用 | 基于扩展量子密钥分发的多实体联合身份认证研究
-
电子与信息器件 | 基于ICEEMDAN和改进Informer的锂电池SOH估计
电子与信息器件 | 基于ICEEMDAN和改进Informer的锂电池SOH估计
-
电子与信息器件 | 考虑矢量网络分析仪校准的条纹消除方法
电子与信息器件 | 考虑矢量网络分析仪校准的条纹消除方法
-
电子与信息器件 | 芯粒接口中高效稳定的边带传输系统设计
电子与信息器件 | 芯粒接口中高效稳定的边带传输系统设计
-
电子与信息器件 | 基于RT-DETR的轻量化交通标志检测算法
电子与信息器件 | 基于RT-DETR的轻量化交通标志检测算法
-
电子与信息器件 | 一种含上电复位功能的超低功耗振荡器设计
电子与信息器件 | 一种含上电复位功能的超低功耗振荡器设计
-
能源技术 | 考虑频率稳定问题的新能源场站VSG储能配置方法
能源技术 | 考虑频率稳定问题的新能源场站VSG储能配置方法
-

能源技术 | 基于分布式算法的储能协同控制策略
能源技术 | 基于分布式算法的储能协同控制策略
-

能源技术 | 不平衡电网下基于虚拟振荡器控制的并网逆变器控制策略
能源技术 | 不平衡电网下基于虚拟振荡器控制的并网逆变器控制策略
-
能源技术 | 计及碳交易机制和耦合需求响应的综合能源系统优化调度
能源技术 | 计及碳交易机制和耦合需求响应的综合能源系统优化调度
-

能源技术 | 基于新能源短路比约束的最大准人容量优化
能源技术 | 基于新能源短路比约束的最大准人容量优化
-
能源技术 | 改进秃鹰算法优化ELM的短期电力负荷预测研究
能源技术 | 改进秃鹰算法优化ELM的短期电力负荷预测研究
-

前沿交叉科学 | 基于属性分割的差分隐私高维数据发布方法
前沿交叉科学 | 基于属性分割的差分隐私高维数据发布方法
-

前沿交叉科学 | 融合局部感知增强的投篮上肢动作分解与高精度识别算法
前沿交叉科学 | 融合局部感知增强的投篮上肢动作分解与高精度识别算法
-
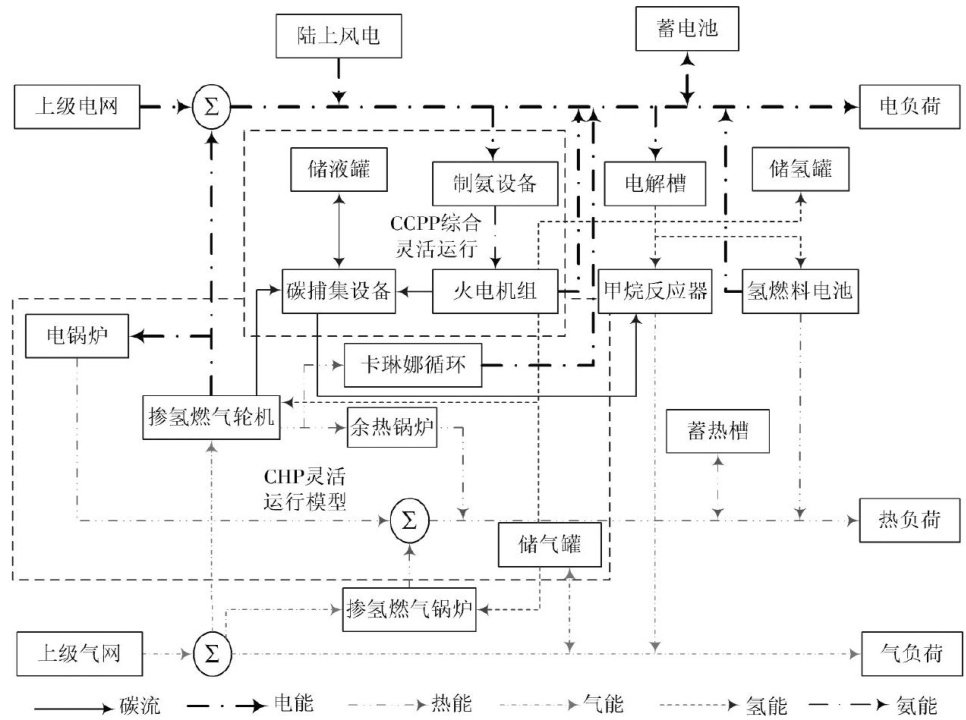
前沿交叉科学 | 计及氢-氨高效利用和碳捕集-MR-CHP联合运行的综合能源系统优化调度
前沿交叉科学 | 计及氢-氨高效利用和碳捕集-MR-CHP联合运行的综合能源系统优化调度
-
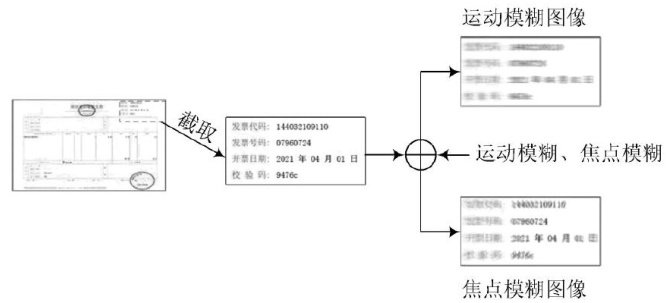
前沿交叉科学 | 一种基于GAN的政务数据中模糊图像复原算法研究
前沿交叉科学 | 一种基于GAN的政务数据中模糊图像复原算法研究
-
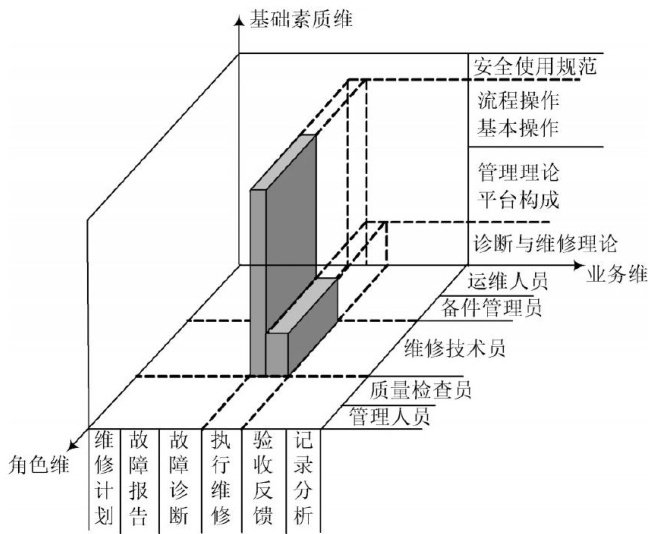
前沿交叉科学 | 基于数据整合与主成分分析法的系统运用类混合式教学模式成绩测评方法
前沿交叉科学 | 基于数据整合与主成分分析法的系统运用类混合式教学模式成绩测评方法
-
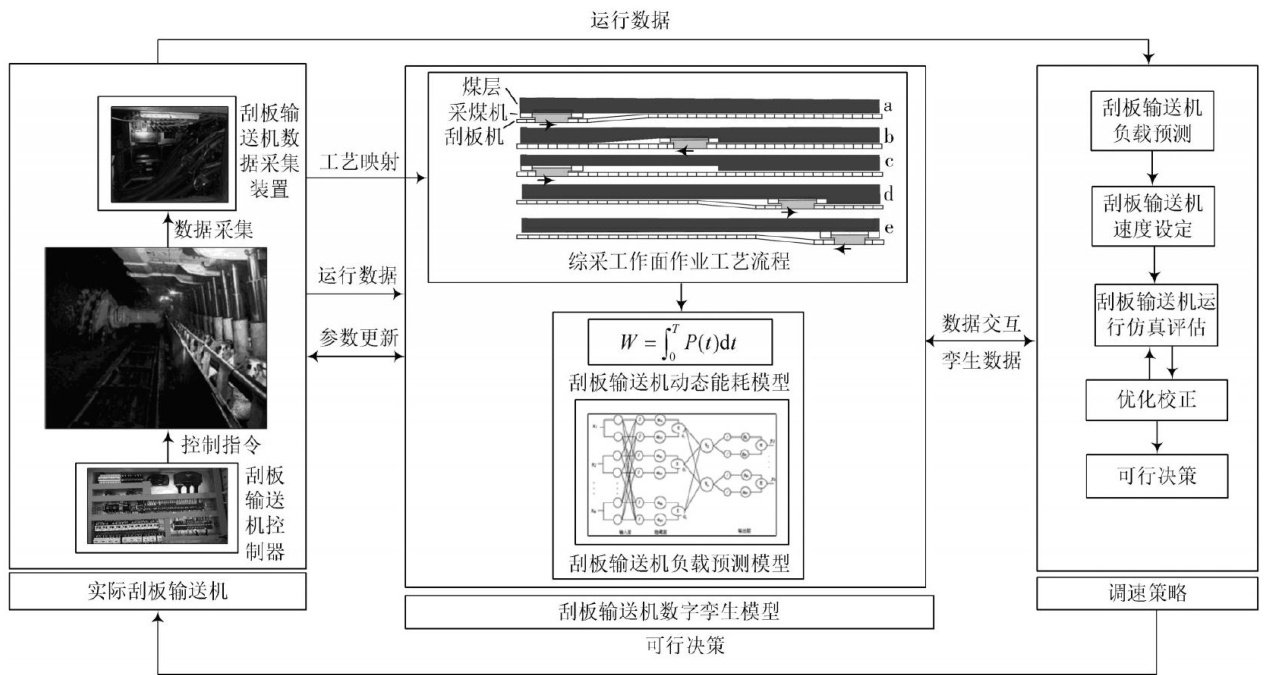
前沿交叉科学 | 基于数字挛生技术的刮板输送机运行速度控制方法研究
前沿交叉科学 | 基于数字挛生技术的刮板输送机运行速度控制方法研究
-
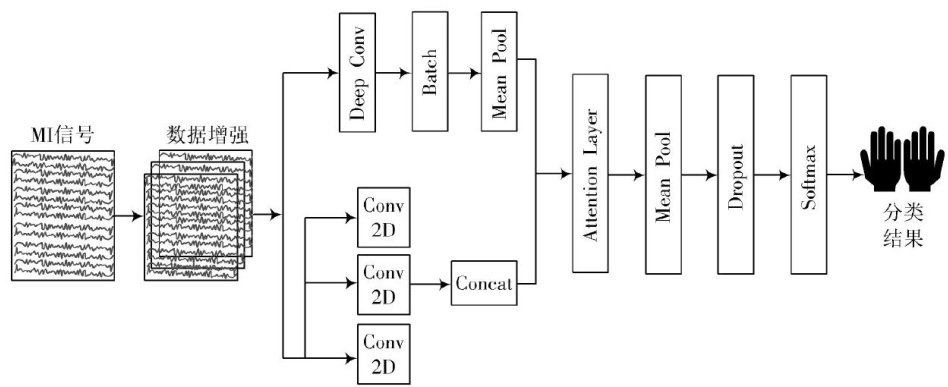
人工智能 | 融合注意力的双分支时空卷积脑电识别网络
人工智能 | 融合注意力的双分支时空卷积脑电识别网络
-

人工智能 | 基于区域分割的无人艇河道路径规划算法
人工智能 | 基于区域分割的无人艇河道路径规划算法
-
人工智能 | 无方向约束的工业机器人障碍物自主规避控制方法
人工智能 | 无方向约束的工业机器人障碍物自主规避控制方法
-
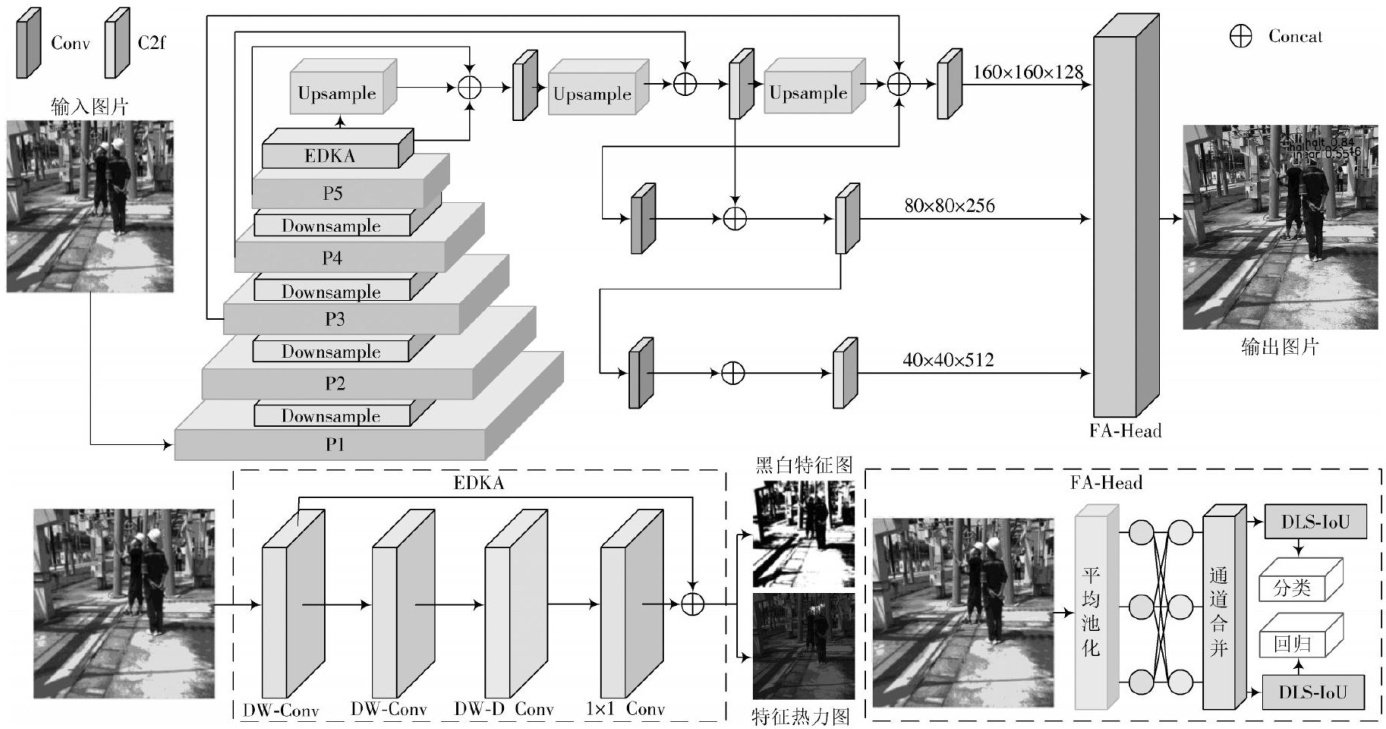
人工智能 | 基于遮挡感知的安全帽细粒度穿戴检测算法
人工智能 | 基于遮挡感知的安全帽细粒度穿戴检测算法
过往期刊
更多-

现代电子技术
2025年23期 -

现代电子技术
2025年22期 -

现代电子技术
2025年21期 -

现代电子技术
2025年20期 -

现代电子技术
2025年19期 -

现代电子技术
2025年18期 -

现代电子技术
2025年17期 -

现代电子技术
2025年16期 -

现代电子技术
2025年15期 -

现代电子技术
2025年14期 -

现代电子技术
2025年13期 -

现代电子技术
2025年12期 -

现代电子技术
2025年11期 -

现代电子技术
2025年10期 -

现代电子技术
2025年09期 -

现代电子技术
2025年08期 -

现代电子技术
2025年07期 -

现代电子技术
2025年06期 -

现代电子技术
2025年05期 -

现代电子技术
2025年04期 -

现代电子技术
2025年03期 -

现代电子技术
2025年02期 -

现代电子技术
2025年01期







 登录
登录