
目录
快速导航-
电子与信息器件 | 基于忆阻器的可编程电路设计与分析
电子与信息器件 | 基于忆阻器的可编程电路设计与分析
-
电子与信息器件 | 一种高性能数控VGA设计
电子与信息器件 | 一种高性能数控VGA设计
-
电子与信息器件 | 基于傅里叶变换的雷电磁频谱研究
电子与信息器件 | 基于傅里叶变换的雷电磁频谱研究
-
电子与信息器件 | 基于模糊T⁃S型内模PID控制算法的无刷直流电机仿真分析
电子与信息器件 | 基于模糊T⁃S型内模PID控制算法的无刷直流电机仿真分析
-

电子与信息器件 | 直线型磁通切换电机特性分析的时步有限元模型
电子与信息器件 | 直线型磁通切换电机特性分析的时步有限元模型
-
计算机科学与应用 | 基于V2X的车联网实验系统设计与实现
计算机科学与应用 | 基于V2X的车联网实验系统设计与实现
-
计算机科学与应用 | 基于数字孪生和IETM的装备常规故障诊断
计算机科学与应用 | 基于数字孪生和IETM的装备常规故障诊断
-
计算机科学与应用 | 基于索引布隆过滤器的DDS自动发现算法
计算机科学与应用 | 基于索引布隆过滤器的DDS自动发现算法
-
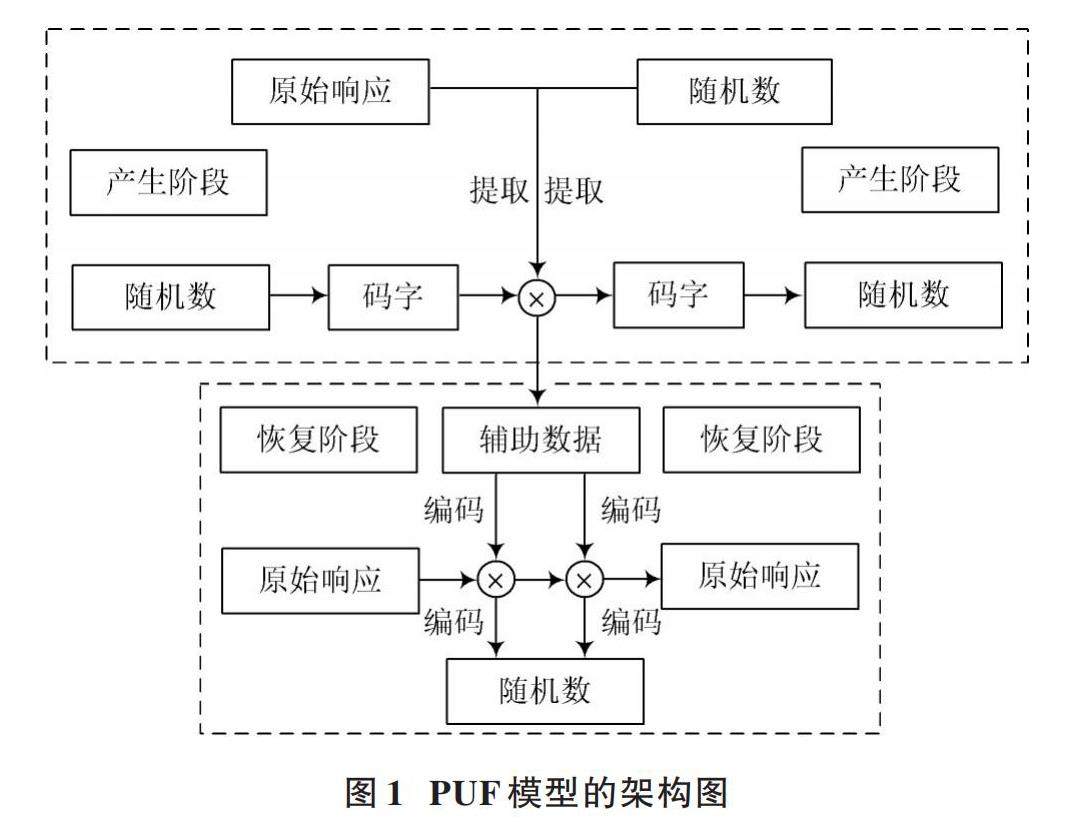
计算机科学与应用 | 基于PUF模型的物联网设备密钥保护机制研究
计算机科学与应用 | 基于PUF模型的物联网设备密钥保护机制研究
-
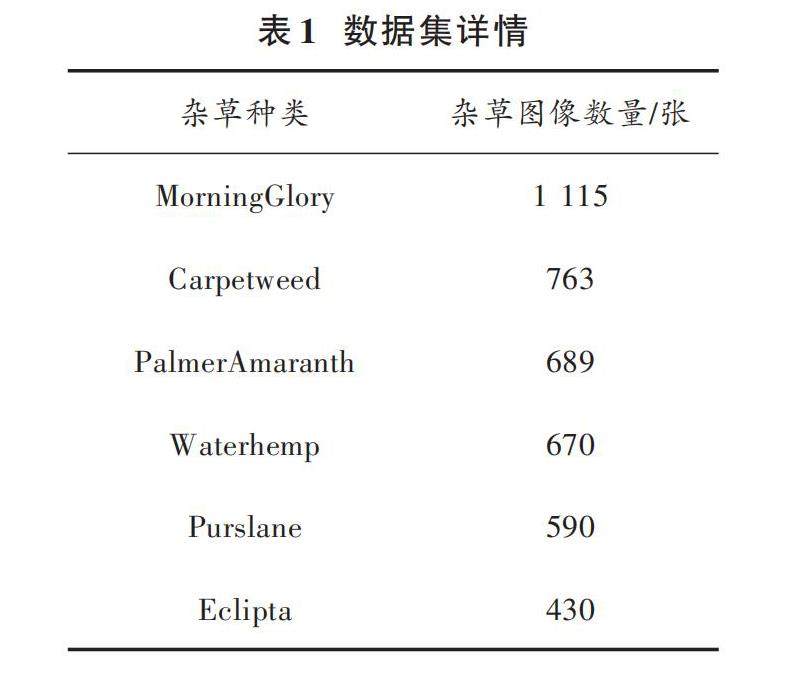
计算机科学与应用 | 改进YOLOv5的棉田杂草检测
计算机科学与应用 | 改进YOLOv5的棉田杂草检测
-

计算机科学与应用 | 基于欠定盲源分离的双路音频信号噪声自适应分离
计算机科学与应用 | 基于欠定盲源分离的双路音频信号噪声自适应分离
-

航空航天航海技术 | 基于改进鲸鱼算法优化LSTM的化工过程故障诊断方法
航空航天航海技术 | 基于改进鲸鱼算法优化LSTM的化工过程故障诊断方法
-
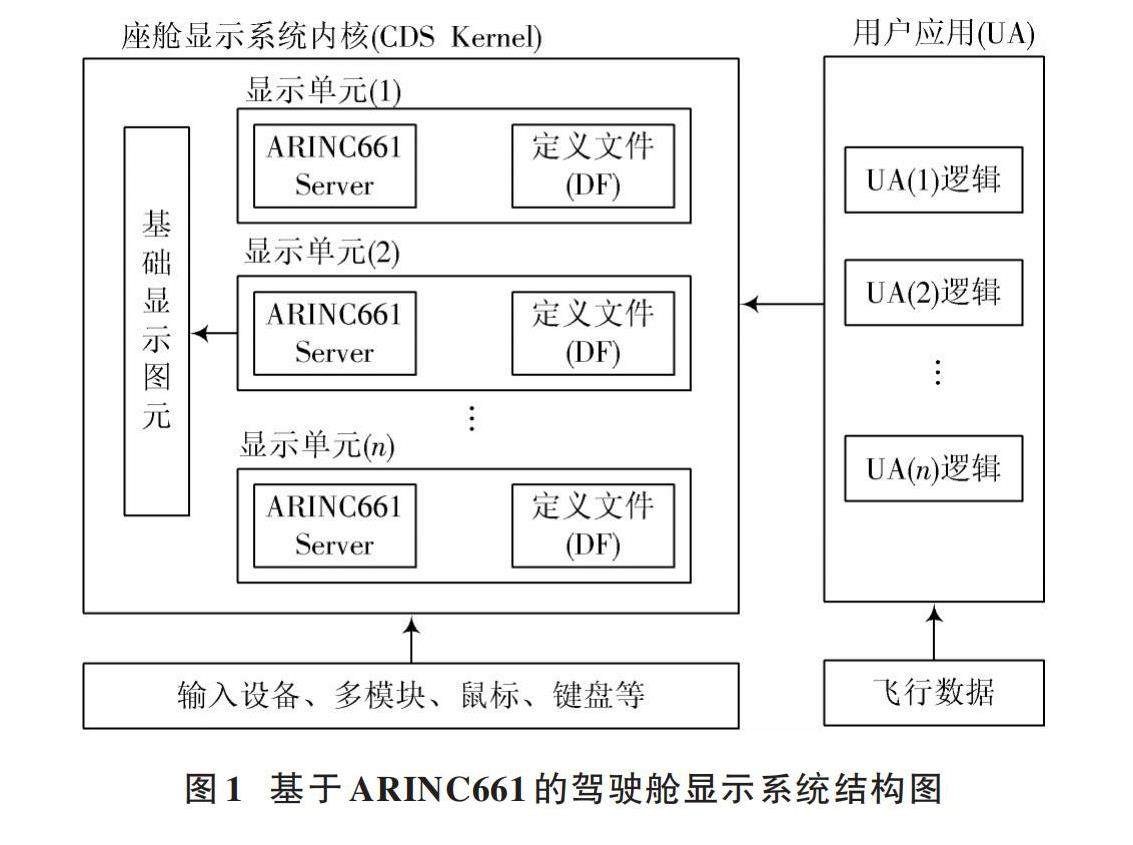
航空航天航海技术 | 基于ARINC661和遗传融合的手势识别算法研究
航空航天航海技术 | 基于ARINC661和遗传融合的手势识别算法研究
-
能源技术 | 基于SSA⁃VMD⁃INGO⁃RF的短期风电功率预测
能源技术 | 基于SSA⁃VMD⁃INGO⁃RF的短期风电功率预测
-

能源技术 | 基于混沌自适应正余弦算法的负荷频率自抗扰控制
能源技术 | 基于混沌自适应正余弦算法的负荷频率自抗扰控制
-

能源技术 | 光伏微网储能系统用电峰谷差自适应控制技术
能源技术 | 光伏微网储能系统用电峰谷差自适应控制技术
-
能源技术 | 基于IPOA和PIDD2⁃FOI的电力系统负荷频率控制
能源技术 | 基于IPOA和PIDD2⁃FOI的电力系统负荷频率控制
-

激光与红外技术 | 基于聚类分析的红外图像配准算法
激光与红外技术 | 基于聚类分析的红外图像配准算法
-
前沿交叉科学 | 基于深度学习的滚动轴承故障预测
前沿交叉科学 | 基于深度学习的滚动轴承故障预测
-
前沿交叉科学 | 基于改进ConvNeXt模型的轻量化岩屑岩性识别方法
前沿交叉科学 | 基于改进ConvNeXt模型的轻量化岩屑岩性识别方法
-

前沿交叉科学 | 基于MSIF⁃CNN的地铁车辆制动系统故障诊断方法
前沿交叉科学 | 基于MSIF⁃CNN的地铁车辆制动系统故障诊断方法
-
前沿交叉科学 | 基于显著性特征的多视角人体动作图像识别研究
前沿交叉科学 | 基于显著性特征的多视角人体动作图像识别研究
-

前沿交叉科学 | DCP算法下三维图像对比度多尺度分数阶增强
前沿交叉科学 | DCP算法下三维图像对比度多尺度分数阶增强
-

人工智能 | 改进海洋捕食者算法的机器人路径规划
人工智能 | 改进海洋捕食者算法的机器人路径规划
-
人工智能 | 基于改进YOLOv8的工厂行人检测算法
人工智能 | 基于改进YOLOv8的工厂行人检测算法
-
人工智能 | 一种面向复杂场景的人脸识别与目标跟踪算法设计
人工智能 | 一种面向复杂场景的人脸识别与目标跟踪算法设计
-
人工智能 | 基于条件GAN的人体复杂动作轮廓智能捕捉研究
人工智能 | 基于条件GAN的人体复杂动作轮廓智能捕捉研究
-
人工智能 | 基于改进秃鹰搜索算法的汽车零部件生产车间调度优化
人工智能 | 基于改进秃鹰搜索算法的汽车零部件生产车间调度优化
过往期刊
更多-

现代电子技术
2024年24期 -

现代电子技术
2024年23期 -

现代电子技术
2024年22期 -

现代电子技术
2024年21期 -

现代电子技术
2024年20期 -

现代电子技术
2024年19期 -

现代电子技术
2024年18期 -

现代电子技术
2024年17期 -

现代电子技术
2024年16期 -

现代电子技术
2024年15期 -

现代电子技术
2024年14期 -

现代电子技术
2024年13期 -

现代电子技术
2024年12期 -

现代电子技术
2024年11期 -

现代电子技术
2024年10期 -

现代电子技术
2024年09期 -

现代电子技术
2024年08期 -

现代电子技术
2024年07期 -

现代电子技术
2024年06期 -

现代电子技术
2024年05期 -

现代电子技术
2024年04期 -

现代电子技术
2024年03期 -

现代电子技术
2024年02期 -

现代电子技术
2024年01期







 登录
登录