
目录
快速导航-
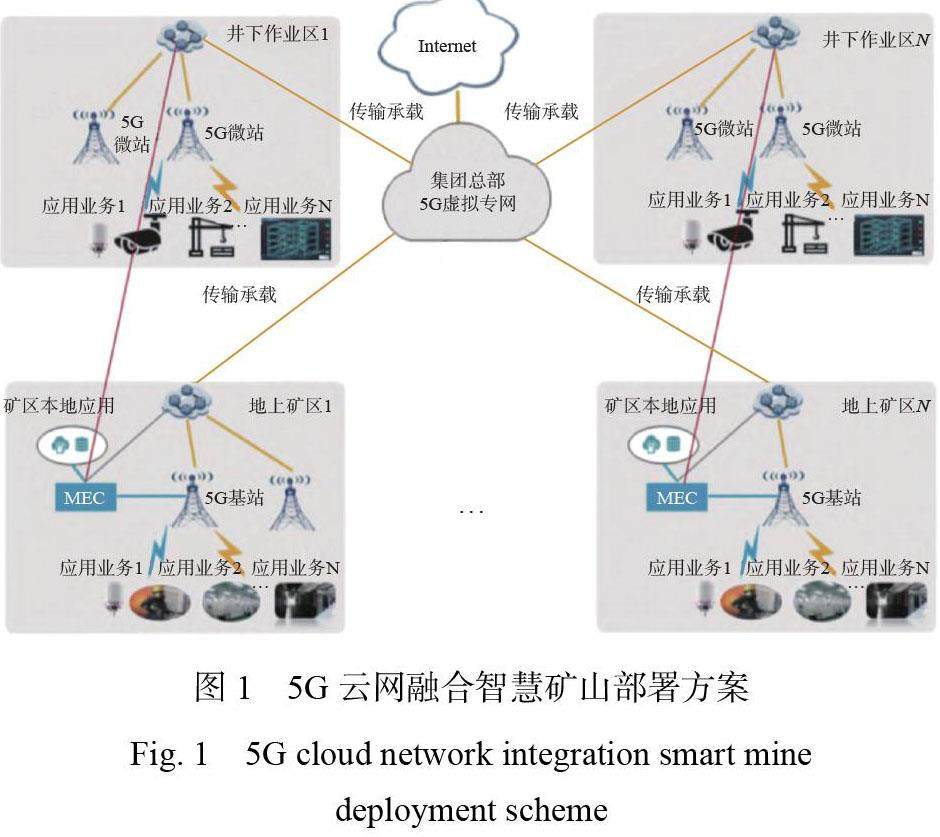
“新一代信息技术在智能矿山中研究与应用”专题 | 新一代信息技术在智能矿山中的研究与应用综述
“新一代信息技术在智能矿山中研究与应用”专题 | 新一代信息技术在智能矿山中的研究与应用综述
-
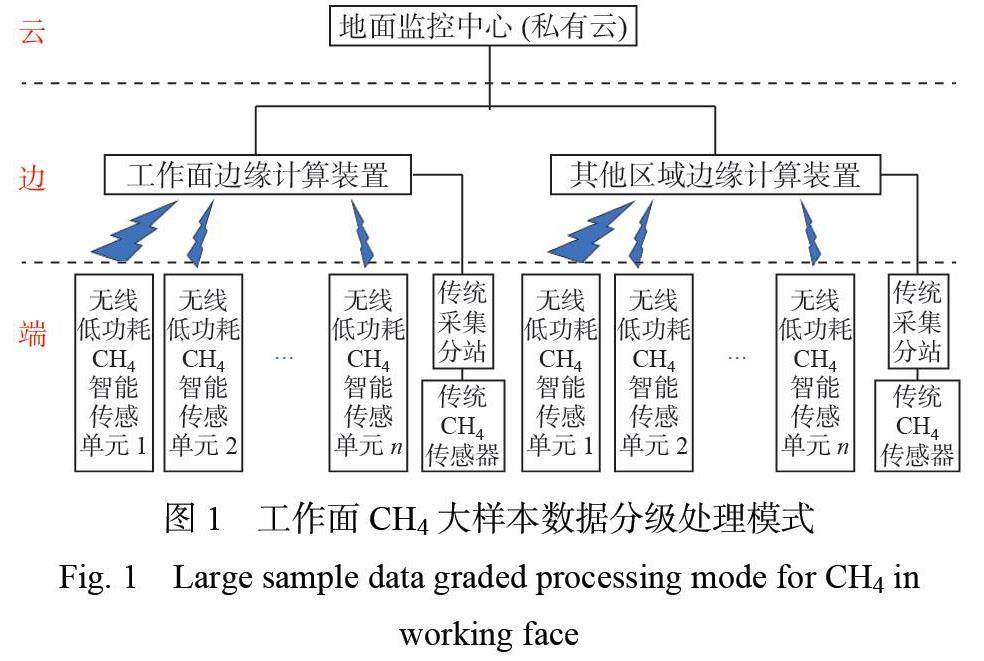
“新一代信息技术在智能矿山中研究与应用”专题 | 采煤工作面CH4大样本数据感知关键技术及监测模式研究
“新一代信息技术在智能矿山中研究与应用”专题 | 采煤工作面CH4大样本数据感知关键技术及监测模式研究
-
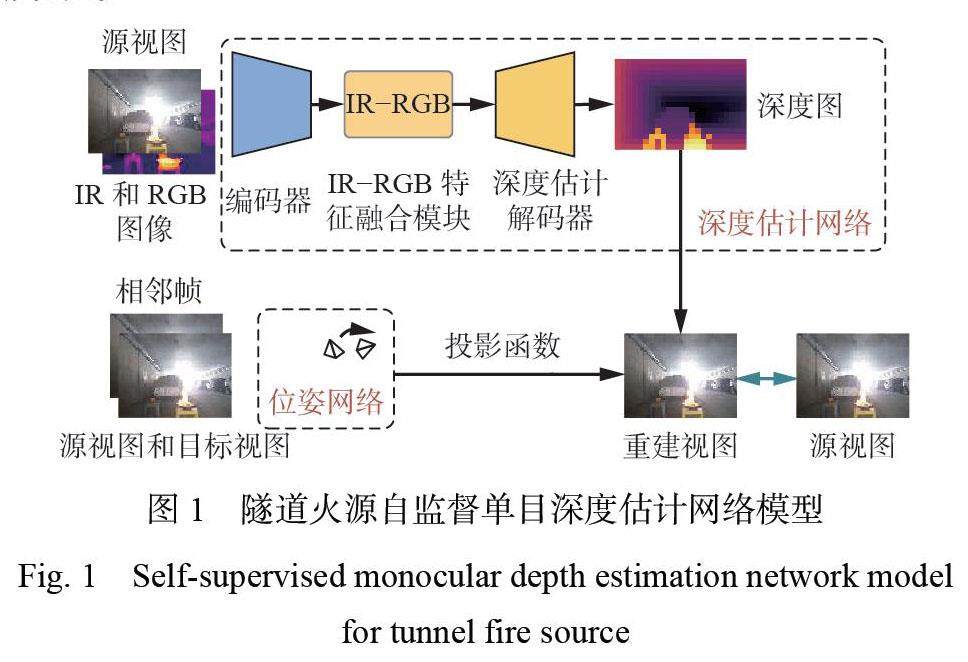
“新一代信息技术在智能矿山中研究与应用”专题 | 红外和可见光图像融合的隧道火源深度估计技术
“新一代信息技术在智能矿山中研究与应用”专题 | 红外和可见光图像融合的隧道火源深度估计技术
-
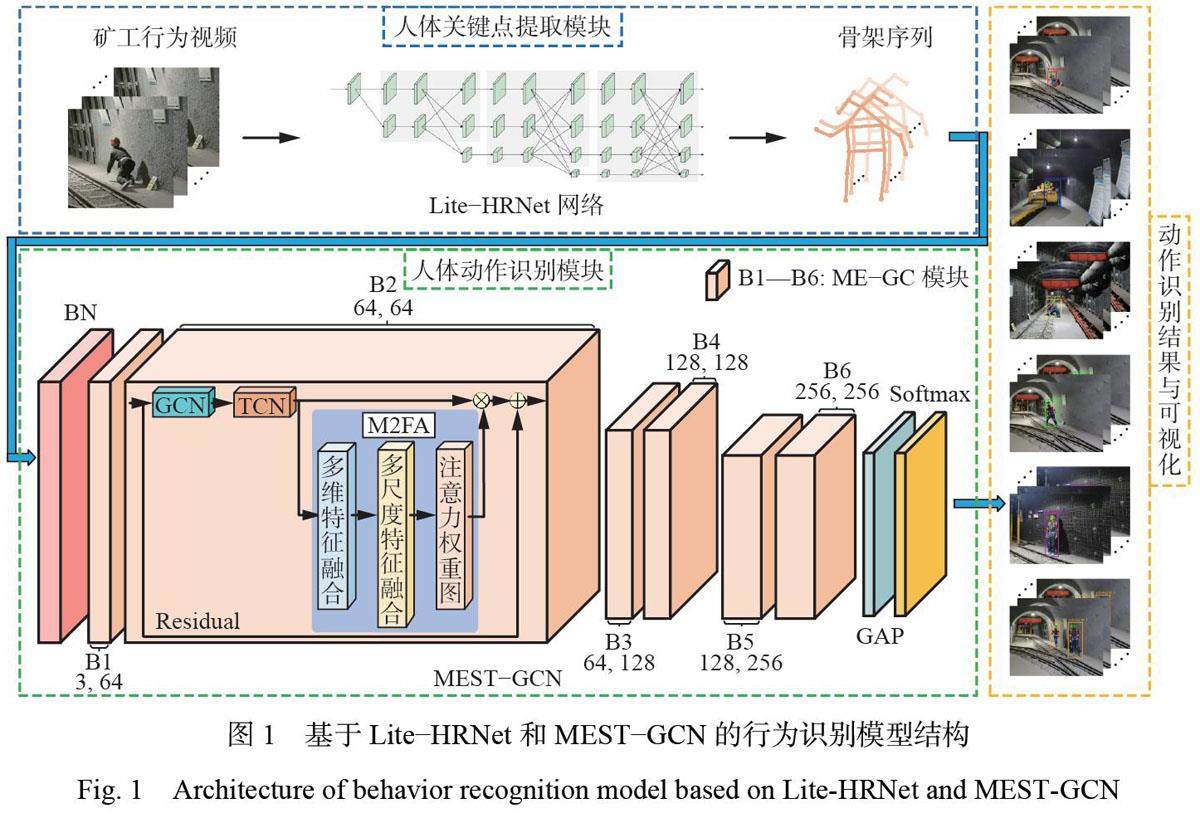
“新一代信息技术在智能矿山中研究与应用”专题 | 轻量化姿态估计时空增强图卷积模型下的矿工行为识别
“新一代信息技术在智能矿山中研究与应用”专题 | 轻量化姿态估计时空增强图卷积模型下的矿工行为识别
-
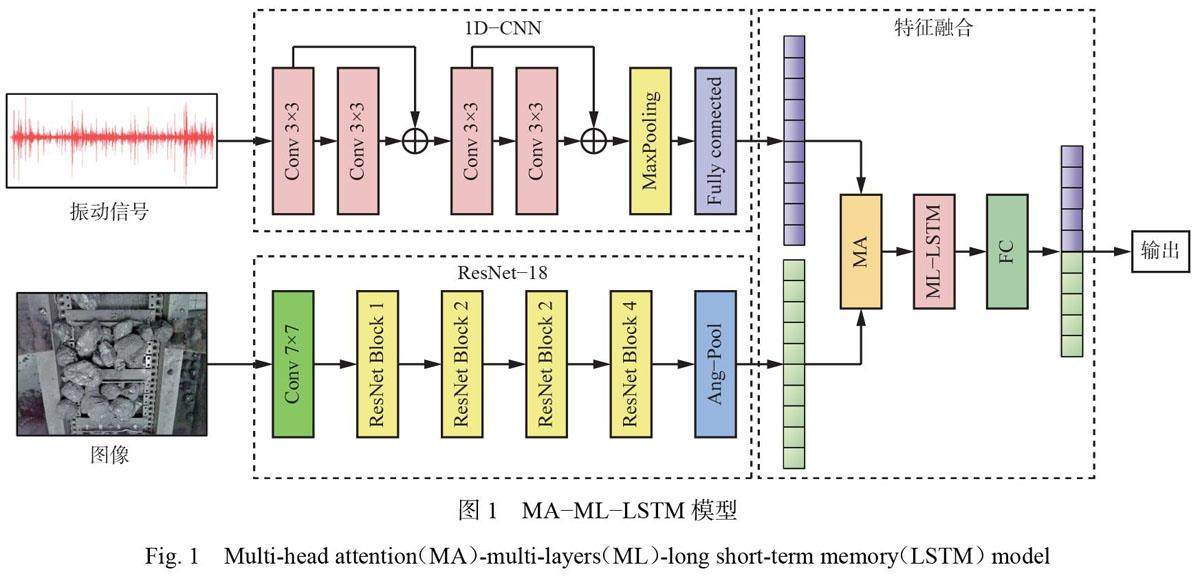
“新一代信息技术在智能矿山中研究与应用”专题 | 图像特征与振动频谱多源融合驱动的煤矸识别技术研究
“新一代信息技术在智能矿山中研究与应用”专题 | 图像特征与振动频谱多源融合驱动的煤矸识别技术研究
-
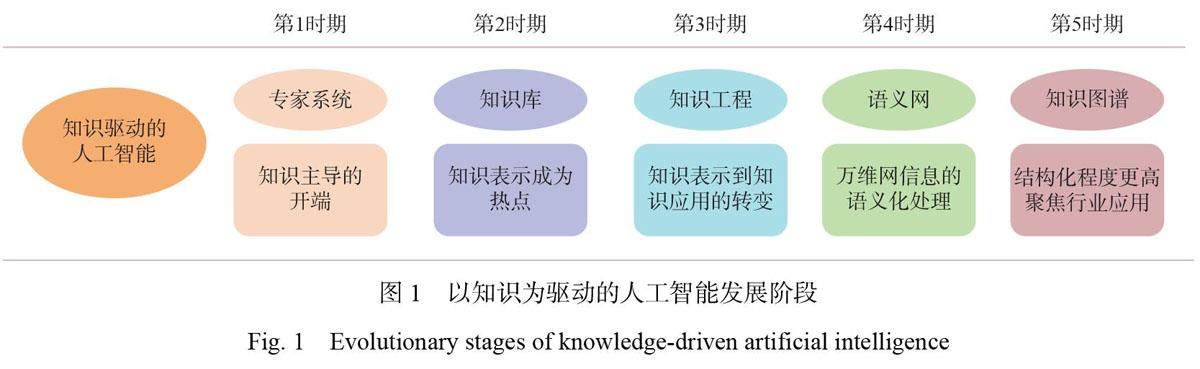
“新一代信息技术在智能矿山中研究与应用”专题 | 煤矿领域知识图谱构建与推理方法研究综述
“新一代信息技术在智能矿山中研究与应用”专题 | 煤矿领域知识图谱构建与推理方法研究综述
-
“新一代信息技术在智能矿山中研究与应用”专题 | 矿用5G通信信号传输的干扰监测技术
“新一代信息技术在智能矿山中研究与应用”专题 | 矿用5G通信信号传输的干扰监测技术
-
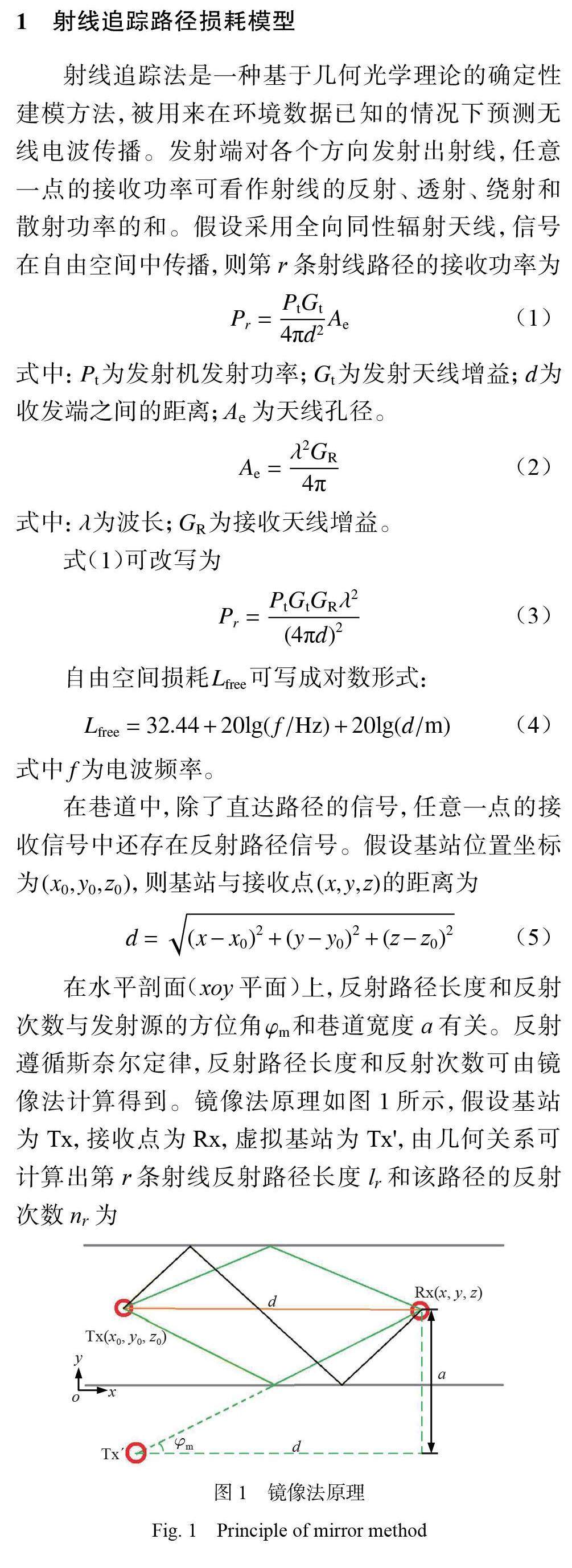
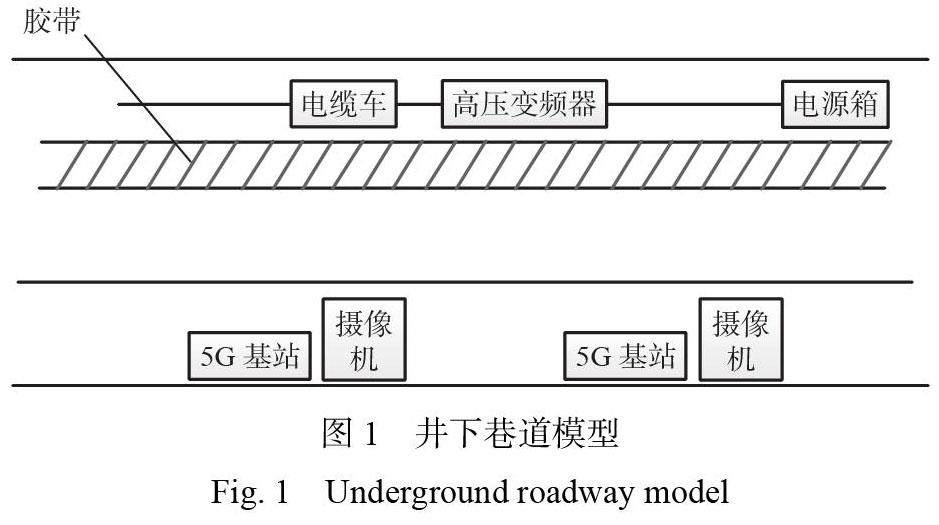
“新一代信息技术在智能矿山中研究与应用”专题 | 基于射线追踪路径损耗模型的煤矿巷道基站选址方法
“新一代信息技术在智能矿山中研究与应用”专题 | 基于射线追踪路径损耗模型的煤矿巷道基站选址方法
-

“新一代信息技术在智能矿山中研究与应用”专题 | 基于已知点约束的高精度煤矿巷道三维点云建模方法
“新一代信息技术在智能矿山中研究与应用”专题 | 基于已知点约束的高精度煤矿巷道三维点云建模方法
-
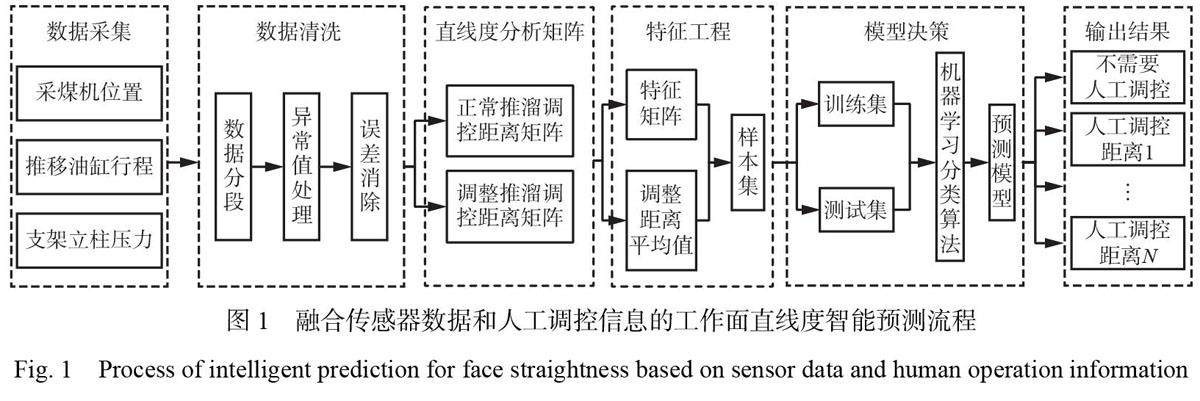
“新一代信息技术在智能矿山中研究与应用”专题 | 融合传感器数据和人工调控信息的工作面直线度智能预测
“新一代信息技术在智能矿山中研究与应用”专题 | 融合传感器数据和人工调控信息的工作面直线度智能预测
-
“新一代信息技术在智能矿山中研究与应用”专题 | 基于GAT−Informer的采空区煤自燃温度预测模型
“新一代信息技术在智能矿山中研究与应用”专题 | 基于GAT−Informer的采空区煤自燃温度预测模型
-
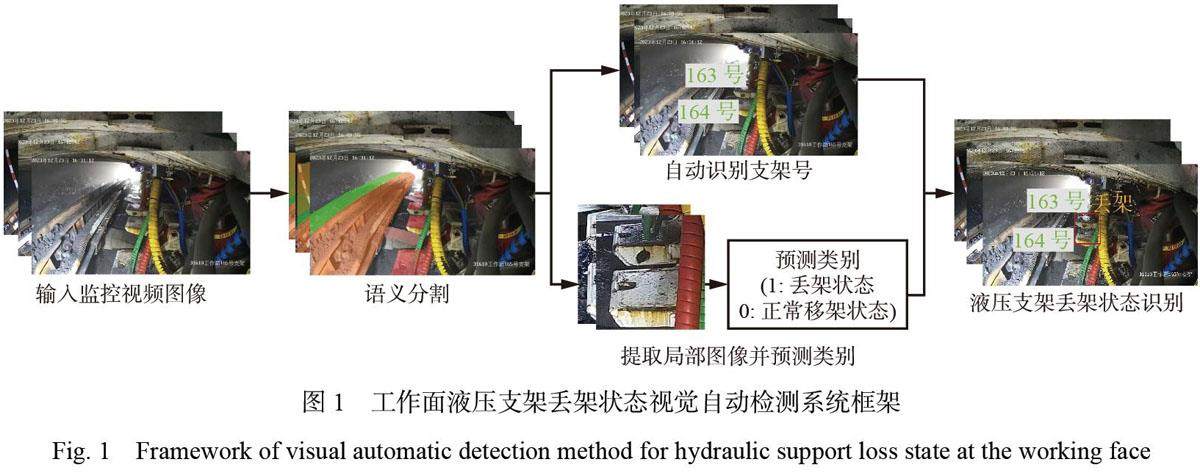
“新一代信息技术在智能矿山中研究与应用”专题 | 工作面液压支架丢架状态视觉自动检测方法
“新一代信息技术在智能矿山中研究与应用”专题 | 工作面液压支架丢架状态视觉自动检测方法
-
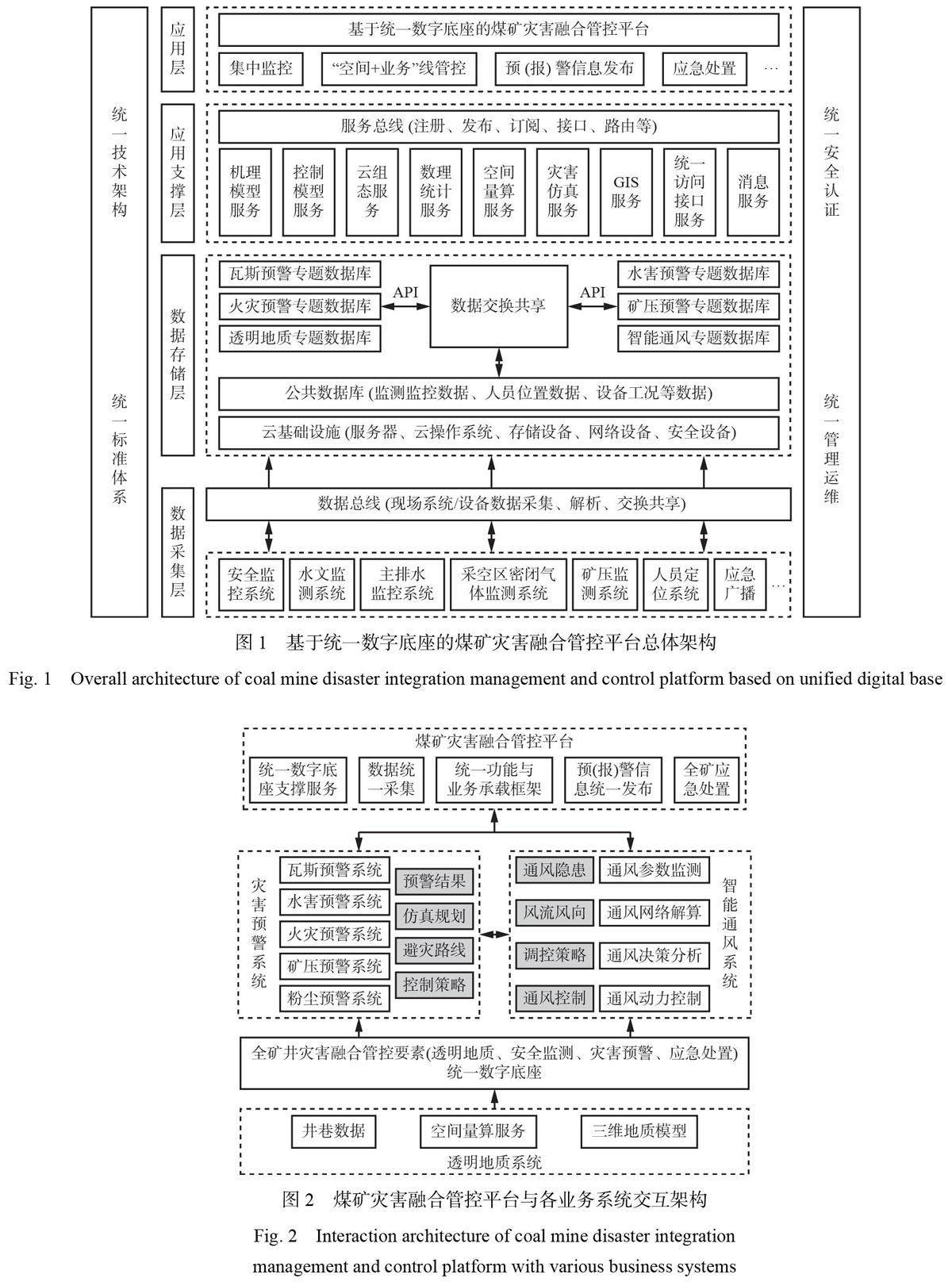
科研成果 | 基于统一数字底座的煤矿灾害融合管控平台
科研成果 | 基于统一数字底座的煤矿灾害融合管控平台
-
科研成果 | 基于改进卡尔曼滤波和状态观测器的井下信号灯闭锁控制
科研成果 | 基于改进卡尔曼滤波和状态观测器的井下信号灯闭锁控制
-
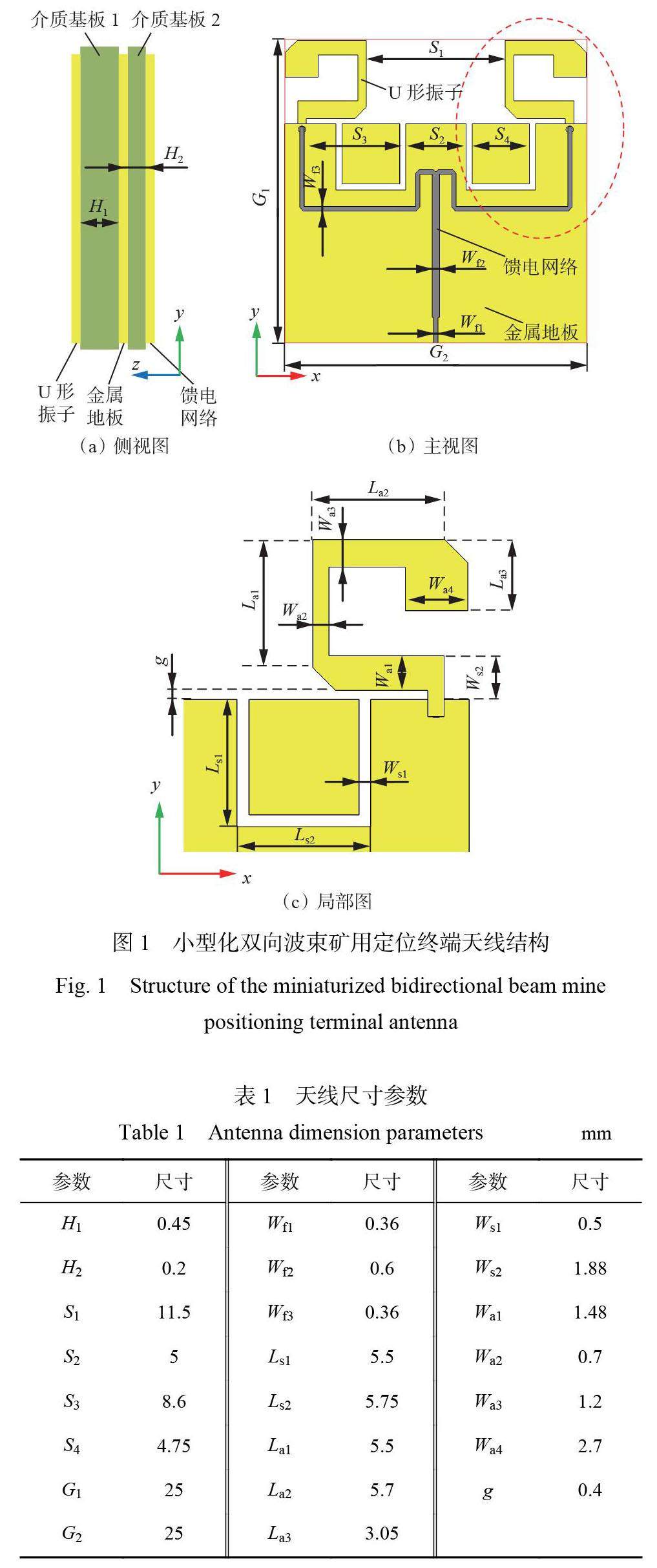
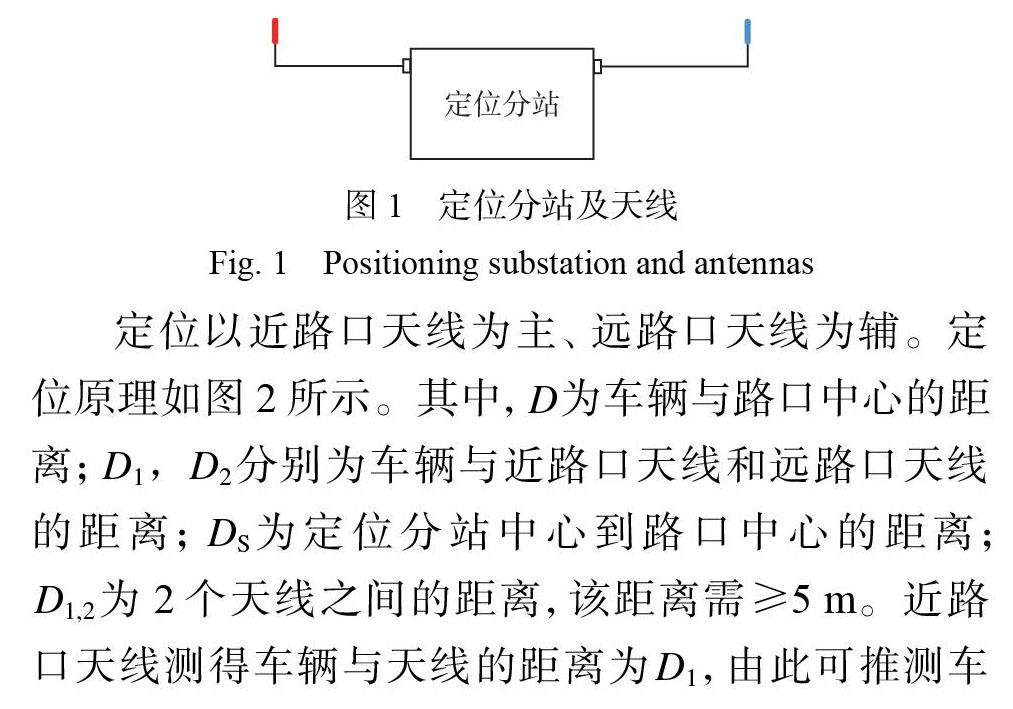
科研成果 | 小型化双向波束矿用定位终端天线设计
科研成果 | 小型化双向波束矿用定位终端天线设计
-
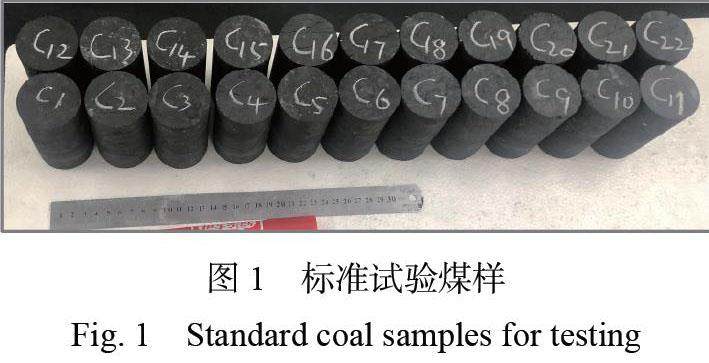
科研成果 | 厚硬顶板悬顶致灾机理及切顶控制技术研究
科研成果 | 厚硬顶板悬顶致灾机理及切顶控制技术研究
-
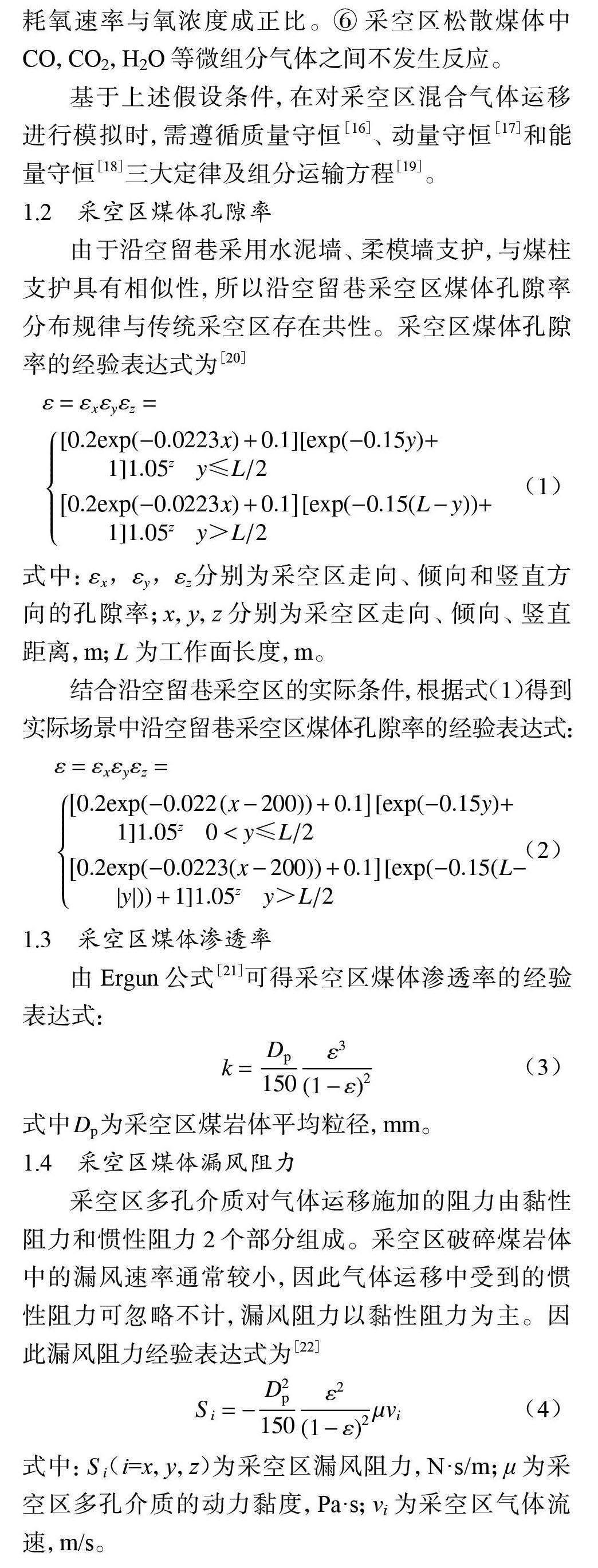
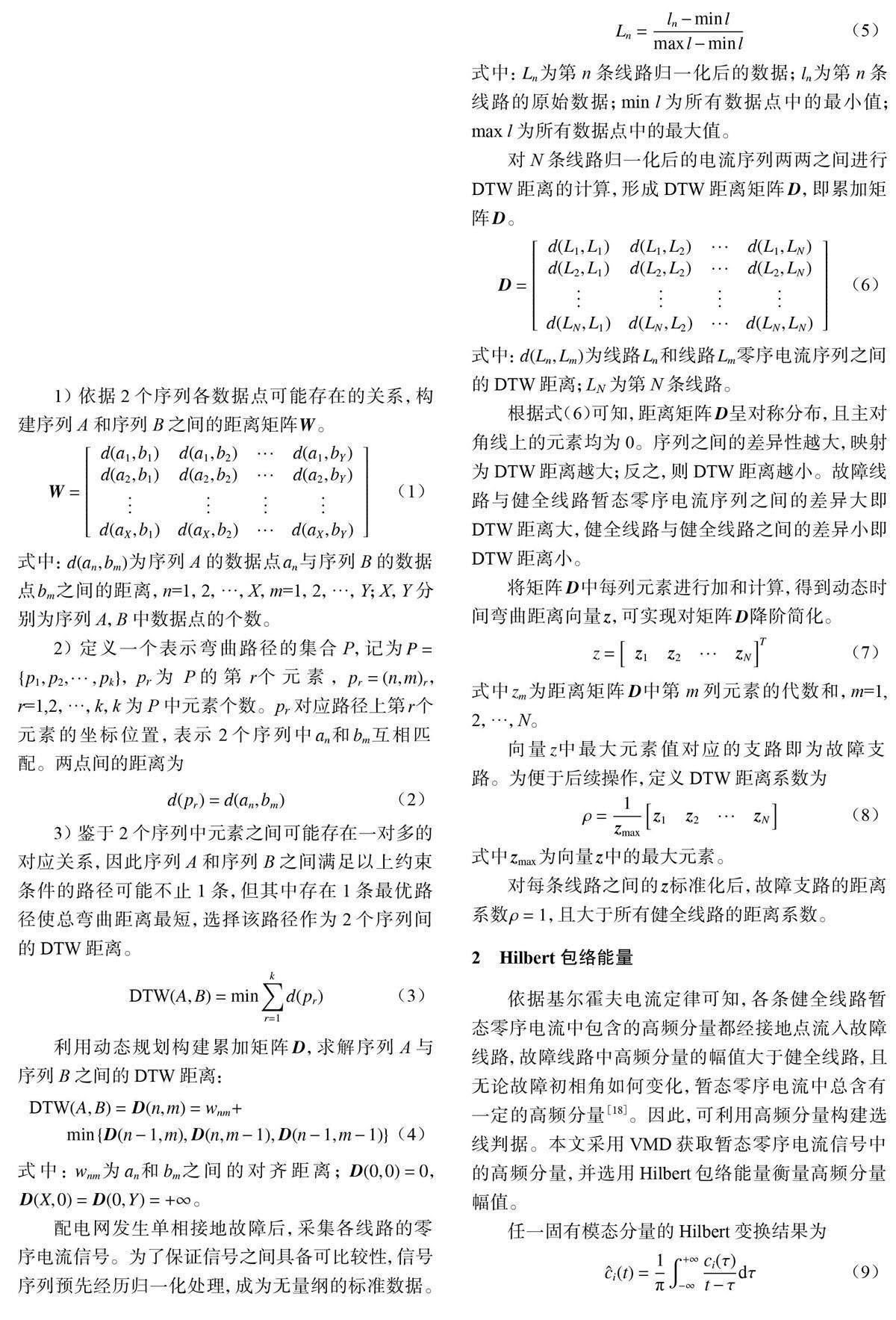
分析与研究 | 通风方式对沿空留巷采空区煤自燃影响规律研究
分析与研究 | 通风方式对沿空留巷采空区煤自燃影响规律研究
-
分析与研究 | 干湿循环处理后煤在差速循环荷载作用下的力学特征
分析与研究 | 干湿循环处理后煤在差速循环荷载作用下的力学特征
-
分析与研究 | 近距离特厚煤层综放开采可行性及合理放煤工艺研究
分析与研究 | 近距离特厚煤层综放开采可行性及合理放煤工艺研究
-
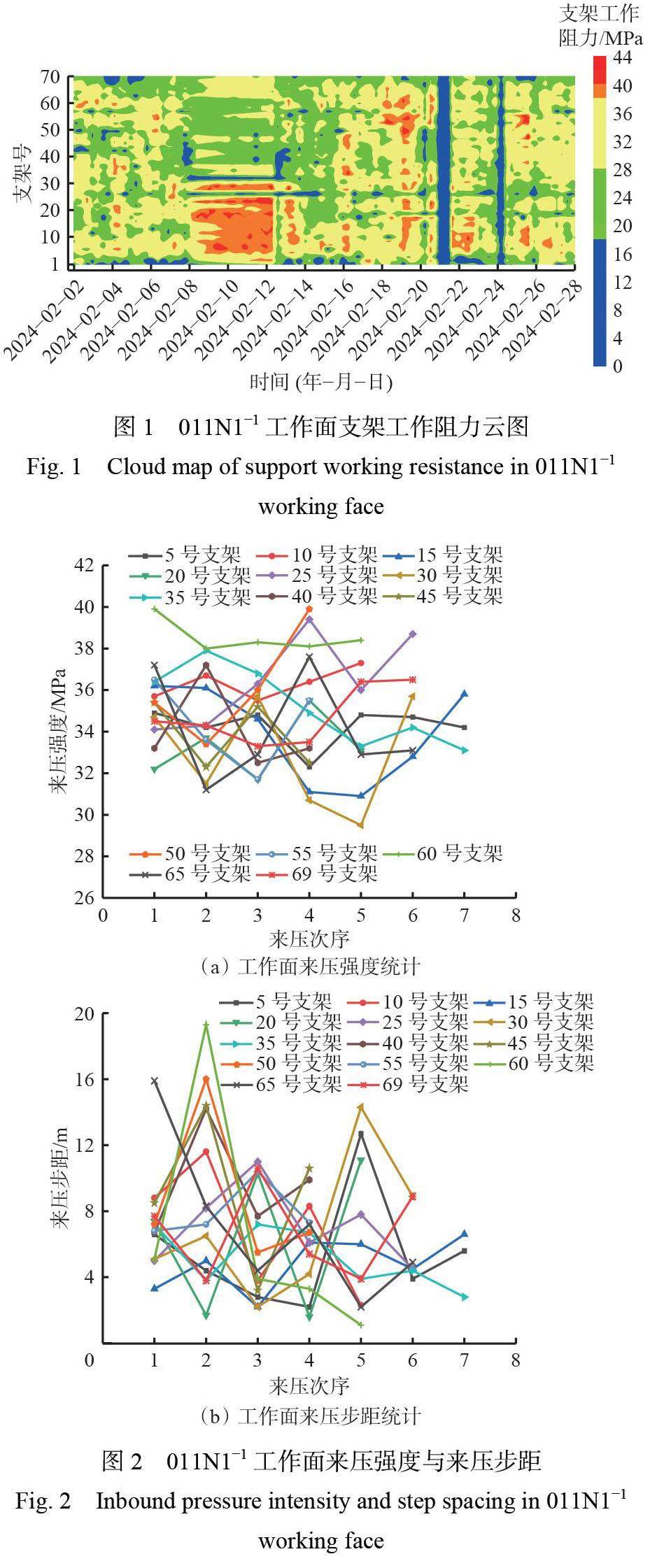
分析与研究 | 基于DTW−Hilbert与改进K−means的谐振接地系统故障选线方法
分析与研究 | 基于DTW−Hilbert与改进K−means的谐振接地系统故障选线方法














 登录
登录