

目录
快速导航-

| 转向机黏滑分析与控制优化研究
| 转向机黏滑分析与控制优化研究
-
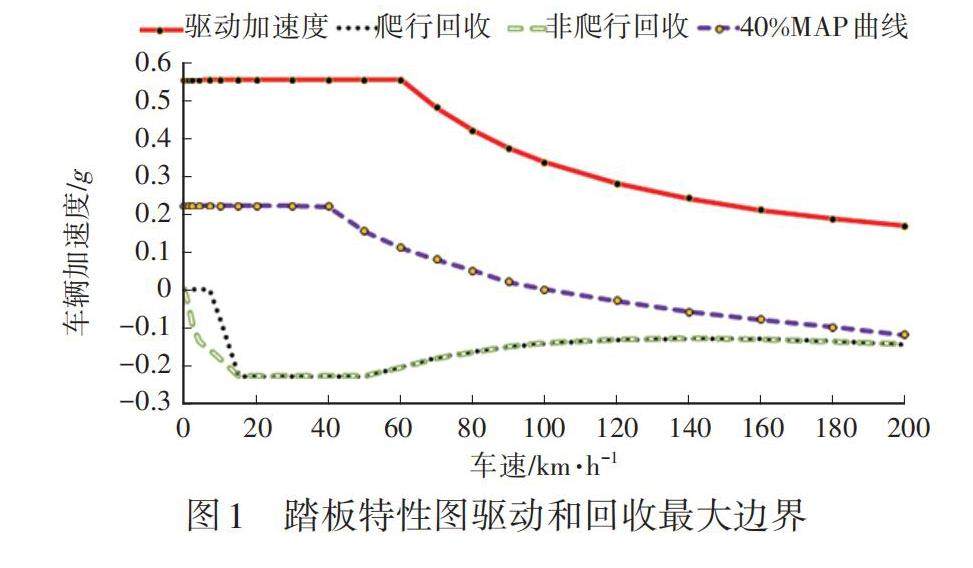
| 基于三参数输入的电动汽车踏板特性标定控制
| 基于三参数输入的电动汽车踏板特性标定控制
-

| 基于图像处理的非接触式车辆轮眉间隙测量系统设计
| 基于图像处理的非接触式车辆轮眉间隙测量系统设计
-
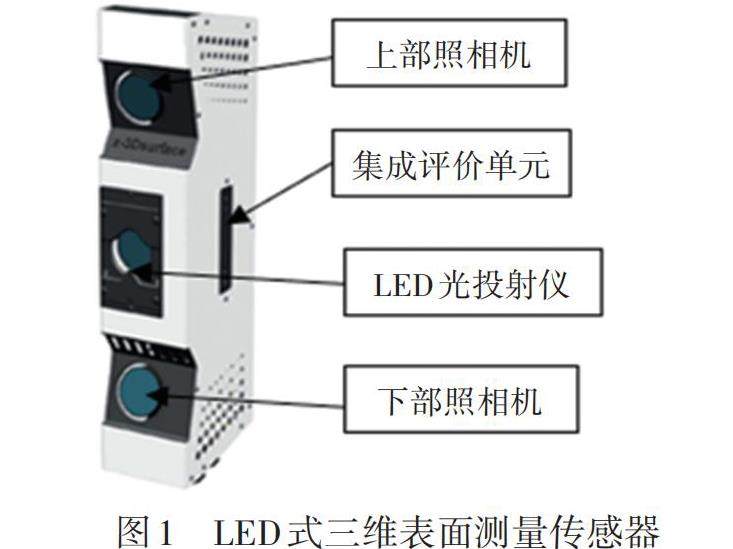
| LED式三维表面测量传感器在汽车底盘几何参数测量中的应用研究
| LED式三维表面测量传感器在汽车底盘几何参数测量中的应用研究
-

| 基于ADAMS/Car的商用车平顺性仿真分析
| 基于ADAMS/Car的商用车平顺性仿真分析
-
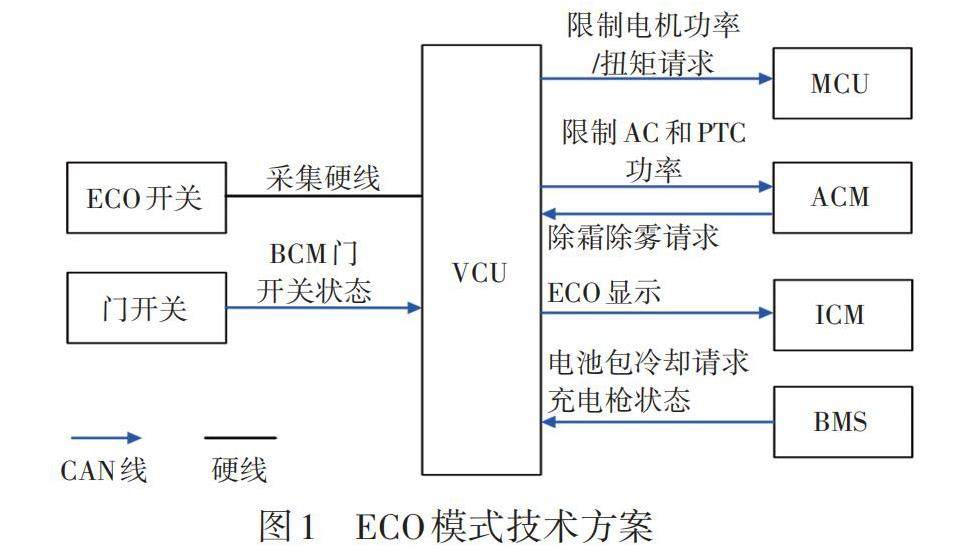
| 纯电动轻型商用车降能耗关键技术及应用
| 纯电动轻型商用车降能耗关键技术及应用
-
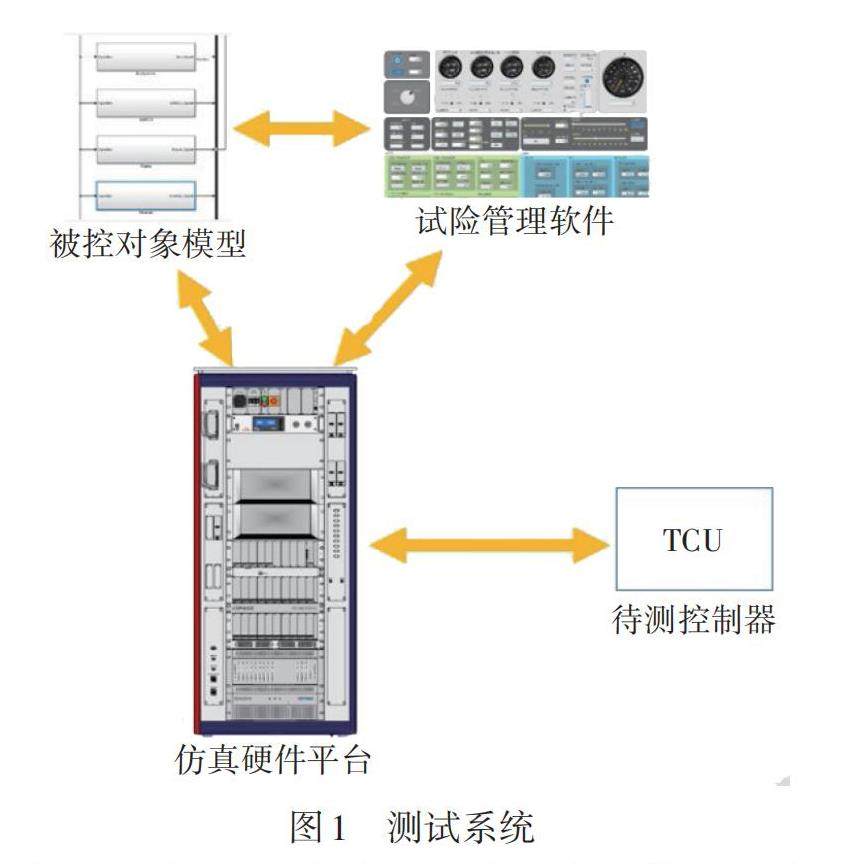
| 机械式自动变速器故障诊断自动化测试方法研究
| 机械式自动变速器故障诊断自动化测试方法研究
-
| 《汽车工程师》2024年总目次
| 《汽车工程师》2024年总目次




















 登录
登录