
目录
快速导航-

研究论文 | 准零刚度隔振技术的曲拱一直梁实现
研究论文 | 准零刚度隔振技术的曲拱一直梁实现
-
研究论文 | 基于BP神经网络PID控制参数自适应优化
研究论文 | 基于BP神经网络PID控制参数自适应优化
-
研究论文 | 低频姿态控制绳系弹射一太赫兹通信地面融合实验
研究论文 | 低频姿态控制绳系弹射一太赫兹通信地面融合实验
-

研究论文 | 基于对偶四元数的机器人运动学手眼标定
研究论文 | 基于对偶四元数的机器人运动学手眼标定
-
研究论文 | 含非线性振子简支梁横向振动特性研究
研究论文 | 含非线性振子简支梁横向振动特性研究
-

研究论文 | 面向电网带电作业的飞行机械臂动力学建模与鲁棒控制
研究论文 | 面向电网带电作业的飞行机械臂动力学建模与鲁棒控制
-

研究论文 | 虚拟轨道列车一道路垂向耦合系统服役性能研究
研究论文 | 虚拟轨道列车一道路垂向耦合系统服役性能研究
-
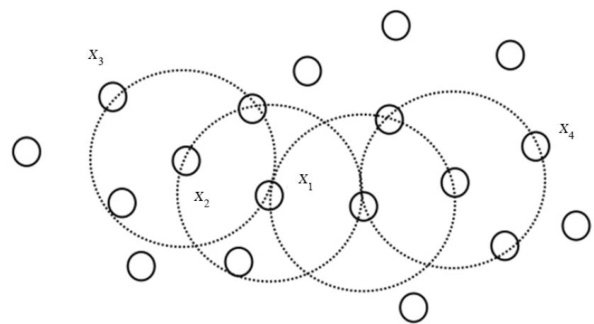
研究论文 | 深度学习结合改进DBSCAN聚类的数据异常检测
研究论文 | 深度学习结合改进DBSCAN聚类的数据异常检测
-

研究论文 | 求解一维椭圆最优控制问题的离散序列二次哈密顿算法
研究论文 | 求解一维椭圆最优控制问题的离散序列二次哈密顿算法














 登录
登录